二分图:
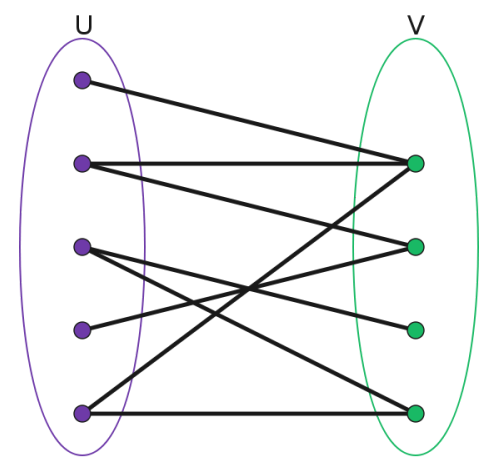
又称作二部图,是图论中的一种特殊模型。 设$G=(V,E)$是一个无向图,如果顶点$V$可分割为两个互不相交的子集$(A,B)$,并且图中的每条边$(i,j)$所关联的两个顶点$i$和$j$分别属于这两个不同的顶点集$(i \in A,j \in B)$,则称图$G$为一个二分图。
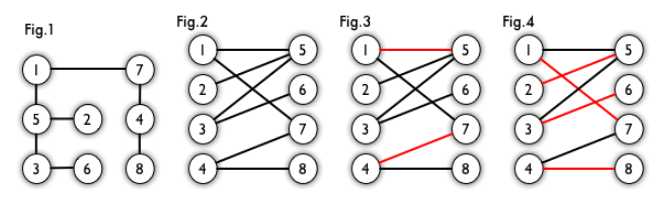
二分图的一个等价定义是:不含有「含奇数条边的环」的图。图 1 是一个二分图。为了清晰,我们以后都把它画成图 2 的形式。
颜色法判断是否为二分图1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
using namespace std;
const int N = 1e6 + 10, M = 2 * N;
int h[N], e[M], ne[M], idx;
int color[N];
int n, m;
// 头插法
void add(int a, int b)
{
e[idx] = b;
ne[idx] = h[a];
h[a] = idx ++;
}
bool dfs(int u, int c)
{
color[u] = c;
for (int i = h[u]; i != -1; i = ne[i])
{
int j = e[i];
if (!color[j])
{
if (!dfs(j, 3 - c)) return false; // 给下一个点相反的颜色
}
else if (color[j] == c) return false; // 相邻点不能为同一颜色
}
return true;
}
int main()
{
memset(h, -1, sizeof h); // init
cin >> n >> m;
for (int i = 0; i < m; i ++)
{
int a, b;
cin >> a >> b;
add(a, b), add(b, a); // 头插法连接图
}
bool flag = true; // 是否为二分图
for (int i = 1; i <= n; i ++) // 数据从1开始
if (!color[i])
{
if (!dfs(i, 1))
{
flag = false;
break;
}
}
if (flag) puts("Yes");
else puts("No");
return 0;
}
匹配:
在图论中,一个「匹配」(matching)是一个边的集合,其中任意两条边都没有公共顶点。例如,图 3、图 4 中红色的边就是图 2 的匹配。
我们定义匹配点、匹配边、未匹配点、非匹配边,它们的含义非常显然。例如图 3 中 1、4、5、7 为匹配点,其他顶点为未匹配点;1-5、4-7为匹配边,其他边为非匹配边。
最大匹配:
一个图所有匹配中,所含匹配边数最多的匹配,称为这个图的最大匹配。图 4 是一个最大匹配,它包含 4 条匹配边。
完美匹配:
如果一个图的某个匹配中,所有的顶点都是匹配点,那么它就是一个完美匹配。图 4 是一个完美匹配。显然,完美匹配一定是最大匹配(完美匹配的任何一个点都已经匹配,添加一条新的匹配边一定会与已有的匹配边冲突)。但并非每个图都存在完美匹配。
求解最大匹配问题的一个算法是匈牙利算法,下面讲的概念都为这个算法服务。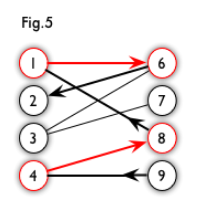
交替路:
从一个未匹配点出发,依次经过非匹配边、匹配边、非匹配边… 形成的路径叫交替路。
9 -> 4 -> 8 -> 1 -> 6
增广路:
从一个未匹配点出发,走交替路,如果途径另一个未匹配点(出发的点不算),则这条交替路称为增广路(agumenting path)。
9 -> 4 -> 8 -> 1 -> 6 -> 2
增广路有一个重要特点:非匹配边比匹配边多一条。因此,研究增广路的意义是改进匹配。只要把增广路中的匹配边和非匹配边的身份交换即可。由于中间的匹配节点不存在其他相连的匹配边,所以这样做不会破坏匹配的性质。交换后,图中的匹配边数目比原来多了 1 条。
我们可以通过不停地找增广路来增加匹配中的匹配边和匹配点。找不到增广路时,达到最大匹配(这是增广路定理)。匈牙利算法正是这么做的。
匈牙利树一般由 BFS 构造(类似于 BFS 树)。从一个未匹配点出发运行 BFS(唯一的限制是,必须走交替路),直到不能再扩展为止。例如,由图 7,可以得到如图 8 的一棵 BFS 树: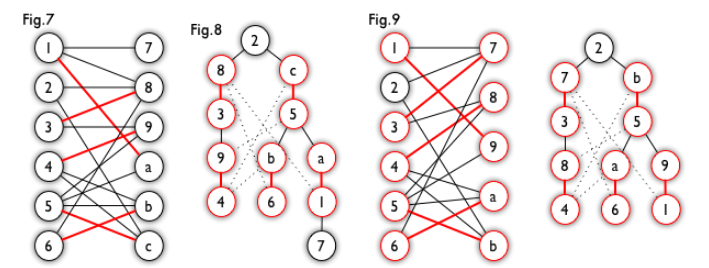
这棵树存在一个叶子节点为非匹配点(7 号),但是匈牙利树要求所有叶子节点均为匹配点,因此这不是一棵匈牙利树。如果原图中根本不含 7 号节点,那么从 2 号节点出发就会得到一棵匈牙利树。这种情况如图 9 所示(顺便说一句,图 8 中根节点 2 到非匹配叶子节点 7 显然是一条增广路,沿这条增广路扩充后将得到一个完美匹配)。
Python1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46M=[]
class DFS_hungary():
def __init__(self, nx, ny, edge, cx, cy, visited):
self.nx, self.ny=nx, ny
self.edge = edge
self.cx = cx
self.cy = cy
self.visited = visited
def max_match(self):
res=0
for i in self.nx:
if self.cx[i]==-1:
for key in self.ny: # 将visited置0表示未访问过
self.visited[key]=0
res+=self.path(i)
return res
def path(self, u):
for v in self.ny:
if self.edge[u][v] and (not self.visited[v]):
self.visited[v]=1
if self.cy[v]==-1:
self.cx[u] = v
self.cy[v] = u
M.append((u,v))
return 1
else:
M.remove((self.cy[v], v))
if self.path(self.cy[v]):
self.cx[u] = v
self.cy[v] = u
M.append((u, v))
return 1
return 0
if __name__ == '__main__':
nx, ny = ['A', 'B', 'C', 'D'], ['E', 'F', 'G', 'H']
edge = {'A':{'E': 1, 'F': 0, 'G': 1, 'H':0}, 'B':{'E': 0, 'F': 1, 'G': 0, 'H':1}, 'C':{'E': 1, 'F': 0, 'G': 0, 'H':1}, 'D':{'E': 0, 'F': 0, 'G': 1, 'H':0}} # 1 表示可以匹配, 0 表示不能匹配
cx, cy = {'A':-1,'B':-1,'C':-1,'D':-1}, {'E':-1,'F':-1,'G':-1,'H':-1}
visited = {'E': 0, 'F': 0, 'G': 0,'H':0}
print(DFS_hungary(nx, ny, edge, cx, cy, visited).max_match())
C++1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
using namespace std;
const int N = 510, M = 100010;
int h[N], e[M], ne[M], idx;
int match[N];
bool st[N];
int n1, n2, m;
void add(int a, int b)
{
e[idx] = b;
ne[idx] = h[a];
h[a] = idx ++;
}
bool find(int u)
{
for (int i = h[u]; i != -1; i = ne[i])
{
int j = e[i];
if (!st[j])
{
st[j] = true;
if (match[j] == 0 || find(match[j])) // 当前匹配到的另一边未匹配,或者已经匹配的人有其他匹配选择
{
match[j] = u; //更新匹配给u
return true;
}
}
}
return false;
}
int main()
{
memset(h, -1, sizeof h);
cin >> n1 >> n2 >> m;
while(m --)
{
int a, b;
cin >> a >> b;
add(a, b);
}
int res = 0;
// 选择一边进行匹配
for (int i = 1; i <= n1; i ++)
{
memset(st, false, sizeof st);
if (find(i)) res ++;
}
printf("%d\n", res);
return 0;
}
匈牙利算法的要点如下:
从左边第 1 个顶点开始,挑选未匹配点进行搜索,寻找增广路。
- 如果经过一个未匹配点,说明寻找成功。更新路径信息,匹配边数 +1,停止搜索。
- 如果一直没有找到增广路,则不再从这个点开始搜索。事实上,此时搜索后会形成一棵匈牙利树。我们可以永久性地把它从图中删去,而不影响结果。
由于找到增广路之后需要沿着路径更新匹配,所以我们需要一个结构来记录路径上的点。DFS 版本通过函数调用隐式地使用一个栈,而 BFS 版本使用 prev 数组。
性能比较:
两个版本的时间复杂度均为$O(V⋅E)$。DFS 的优点是思路清晰、代码量少,但是性能不如 BFS。我测试了两种算法的性能。对于稀疏图,BFS 版本明显快于 DFS 版本;而对于稠密图两者则不相上下。在完全随机数据 9000 个顶点 4,0000 条边时前者领先后者大约 97.6%,9000 个顶点 100,0000 条边时前者领先后者 8.6%, 而达到 500,0000 条边时 BFS 仅领先 0.85%。
补充定义和定理:
最大匹配数:最大匹配的匹配边的数目
最小点覆盖数:选取最少的点,使任意一条边至少有一个端点被选择
最大独立数:选取最多的点,使任意所选两点均不相连
最小路径覆盖数:对于一个 DAG(有向无环图),选取最少条路径,使得每个顶点属于且仅属于一条路径。路径长可以为 0(即单个点)。
定理1:最大匹配数 = 最小点覆盖数(这是 Konig 定理)
定理2:最大匹配数 = 最大独立数
定理3:最小路径覆盖数 = 顶点数 - 最大匹配数
